Роботаракана научили пассивно деформироваться
Так он пролезает через узкие щели

Американские инженеры создали миниатюрного роботаракана mCLARI с деформируемым корпусом. Четвероногий робот имеет массу 976 миллиграмм и длину 20 миллиметров в недеформированном состоянии. Ноги роботаракана приводятся в движение восемью пьезоэлектрическими актуаторами, с помощью которых робот может двигаться в любом направлении без поворота вокруг вертикальной оси. Корпус имеет четыре гибких соединения, благодаря чему способен сжиматься на 60 процентов и растягиваться на 150. Это позволяет роботаракану протискиваться через узкие щели и передвигаться в ограниченном пространстве, говорится в статье, препринт которой доступен на arXiv.org.
При поддержке высокопроизводительного и масштабируемого российского веб-сервера Angie
Существуют направления разработки, в которых инженеры создают роботов для сред, изначально недоступных для человека. Одно из них — роботы, которые благодаря малому размеру способны проникать в небольшие проемы в конструкциях и передвигаться в ограниченном пространстве. К примеру, компания Rolls-Royce предложила использовать микророботов для диагностики состояния авиационных двигателей без необходимости их демонтажа и разборки, а инженеры из Гарвардского университета создали реальный прототип такого миниатюрного робота, который способен передвигаться внутри двигателя (в том числе и вверх ногами).
Конструкция этого робота была основана на проекте миниатюрного роботаракана HARM, различные варианты которого способны, например, передвигаться по воде, а также взбираться на горки и прыгать. Теперь же инженеры под руководством Каушика Джаярама (Kaushik Jayaram) из Колорадского университета использовали идеи, заложенные в проекте HARM, для создания роботаракана под названием mCLARI (mini Compliant Legged Ambulatory Robotic Insect — миниатюрное податливое передвигающееся на ногах роботизированное насекомое).

Основной особенностью нового робота стала способность проходить через препятствия, ширина которых меньше линейных размеров самого робота. Это стало возможным благодаря четырем гибким соединениям в конструкции корпуса, за счет которых роботаракан может пассивно деформироваться, сжимаясь на 66 процентов или растягиваясь на 150 процентов от изначального размера. В недеформированном состоянии углеволоконный корпус mCLARI имеет симметричную квадратную форму с длиной стороны 20 миллиметров. Масса робота составляет 976 миллиграмм.
Корпус робота состоит из четырех связанных друг с другом гибкими соединениями модулей с независимо действующими ногами. Как и в конструкции робота HARM, они приводятся в действие с помощью двух пьезоэлектрических актуаторов, которые располагаются параллельно друг другу возле каждой ноги mCLARI. У каждого из актуаторов только одна степень свободы, при этом к ним присоединены части механической передачи, которая с другой стороны присоединяется к ноге. Трансмиссия преобразует движения одного из актуаторов в движение ноги по вертикали, а второго — по горизонтали. За счет этого ноги робота имеют две степени слободы и могут двигаться произвольно, в том числе описывать в воздухе круг.
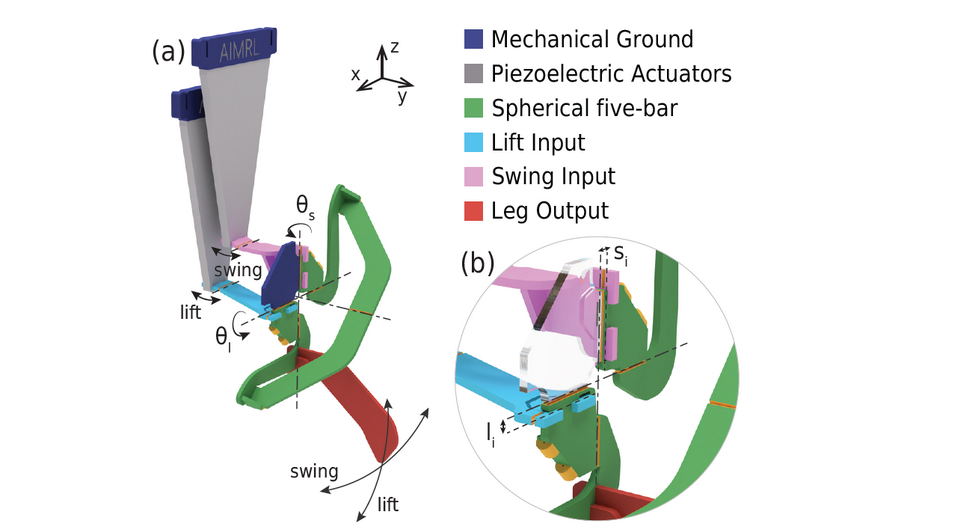
Конструкция привода ног
H. Kabutz et al. / arXiv, 2023
Испытания роботаракана показали, что он способен развивать максимальную скорость около трех длин тела в секунду, что равно примерно 60 миллиметрам в секунду при частоте работы актуаторов 10 герц. Главной же особенностью робота оказалась его способность преодолевать узкие препятствия, размеры которых меньше линейных размеров корпуса в недеформированном состоянии. Например, роботаракан за счет пассивной податливости своего корпуса шириной 20 миллиметров смог преодолеть узкую щель шириной около 16 миллиметров. При этом конструкция ног и симметричность корпуса позволяют роботу двигаться в любом направлении. Благодаря этому робот может преодолевать ограниченные пространства с крутыми поворотами, просто изменяя направление движения без необходимости поворота корпуса вокруг вертикальной оси.
Недавно американские инженеры продемонстрировали, что миниатюрные роботы могут функционировать автономно в течение длительного время без собственного источника энергии на борту. Разработанный ими четырехколесный робот MilliMobile имеет массу около грамма и использует для работы электромоторов и бортовой электроники энергию света или радиоволн.

В его основе лежат гидравлические мышцы на полимерном скелете
Польский робототехнический стартап Clone анонсировал разработку полноразмерного мускульно-скелетного робота-андроида Clone Alpha. Он будет состоять из имитирующих человеческое тело систем: полимерного скелета, мышц, нервной и сосудистой систем. В движение робот будет приводиться за счет искусственных гидравлических мышц и управляться с помощью зрительно-моторной базовой нейросетевой модели. По словам компании, предварительный заказ на одного из первых 279 роботов можно будет оформить в 2025 году.