Японцы научили робота быстро работать в паре с человеком
Японские инженеры научили робоманипулятор отслеживать положение объектов и быстро подстраивать свои движения под движения человека для синхронизации действий. Краткое описание разработки опубликовано на сайте Токийского университета.

Взаимодействие между человеком и роботом (Human-robot interaction, HRI) - это одно из важнейших направлений в современной робототехнике. В рамках него инженеры разрабатывают роботов, предназначенных для помощи человеку и совместной работы с ним, а также предлагают различные концепции и исследуют психологические или социальные аспекты такого взаимодействия. В частности, пока роботы не находятся на достаточно высоком уровне развития, инженеры создают роботов-помощников, которые могут, к примеру, подавать инструменты, держать грузы или выполнять другие вспомогательные работы. Тем не менее, даже такие роботы зачастую не могут сравниться с человеком по скорости работы, а значит, не подходят для реального применения вне лабораторий.
Группа инженеров из лаборатории Масатоси Исикавы (Masatoshi Ishikawa) Токийского университета создала роботизированный манипулятор, способный отслеживать движения человека и адаптировать собственные с задержкой в одну миллисекунду.
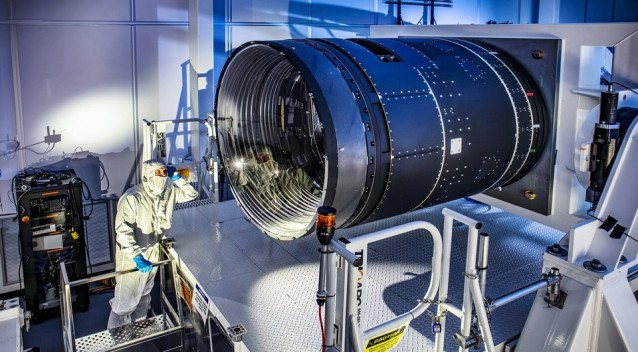
Манипулятор состоит из трех пальцев, закрепленных на едином основании. Манипулятор работает в паре с высокоточной системой отслеживания движений, состоящей из инфракрасного излучателя, освещающего предмет в руке, а также высокоскоростной камеры. Для отслеживания движений инженеры выбрали распространенный метод — на края предмета закрепляются светоотражающие маркеры, положение которых в реальном времени определяется камерой.
Благодаря такой системе робот умеет в реальном времени подстраивать положение своих пальцев при вращении пластины человеком вокруг двух осей, а также компенсировать наклонение пластины таким образом, чтобы она всегда была параллельна полу. В качестве демонстрации возможностей системы инженеры показали, как человек вместе с роботом могут насадить пластину с отверстием диаметром 6,35 миллиметров на металлический штырь диаметром 6,325 миллиметров, оставляя пластину в горизонтальном положении.
Разработчики не рассказали о том, какими они видят потенциальные применения разработки. Возможно, такую систему можно применить в тяжелых моторизированных станках, которые могли бы постоянно отслеживать направление усилия пользователя и двигаться в соответствии с ним.
Недавно инженеры из лаборатории Масатоси Исикавы представили другое применение для трехпальцевого манипулятора с высокоскоростной системой отслеживания движений. Они научили его собирать кубик Рубика, выполняя движения трех типов и отслеживая положение центра масс кубика с частотой 500 раз в секунду. Кроме того, чуть позже они показали другого ловкого и быстрого робота, который умеет ловить падающие предметы, не повреждая их. В качестве примера инженеры продемонстрировали, что робот способен словить падающий на него кусочек маршмэллоу, практически не сминая его.
Григорий Копиев
И летать по заданной траектории
Инженеры разработали прототип миниатюрного орнитоптера под названием Bee++. В воздух он поднимается с помощью четырех крыльев, а его масса составляет 95 миллиграмм. Махолет управляется по тангажу, крену и рысканью и способен летать по заданной траектории. Статья с описанием робопчелы опубликована в журнале IEEE Transactions on Robotics. В последние годы становятся популярными разработки в области миниатюрных беспилотников, которые по размеру сопоставимы с насекомыми. Миниатюризация вынуждает инженеров отходить от ставшей уже классической схемы с воздушными винтами и электромоторами, так как использовать их эффективно в беспилотниках весом меньше грамма невозможно. Вместо этого инженеры используют схему орнитоптеров — летательных аппаратов, у которых подъемная сила создается за счет периодических взмахов крыльями. Для приведения их в движение обычно применяют пьезоэлектрические актуаторы, передающие усилие на крылья через механическую трансмиссию. Несмотря на то, что эта схема доказала свою работоспособность, большинство из созданных сегодня миниатюрных махолетов не имеют стабильного управления по оси рысканья. Эту проблему решили инженеры под руководством Нестора Переса-Арансибии (Nestor Perez-Arancibia) из Университета штата Вашингтон. Они построили миниатюрный орнитоптер, который управляется по всем трем осям. Микроорнитоптер, названный Bee++, представляет собой улучшенную версию орнитоптера, представленную авторами в 2019 году. Так же, как и предшественник, Bee++ имеет четыре машущих крыла, приводимых в действие индивидуальными пьезоэлектрическими актуаторами, а его масса составляет 95 миллиграмм. Сверху и снизу на корпус установлены восемь защитных стержней, которые предотвращают махолет от ударов об окружающие предметы. Питание прототип получает через провода. Несмотря на то, что крылья не имеют механизмов управления углом установки, плоскости их движения имеют заранее определенный наклон. Благодаря этому удается создавать крутящий момент по крену, тангажу и рысканью за счет изменения амплитуды движения пар крыльев. Например, для того чтобы наклонить махолет вперед, амплитуда пары крыльев, расположенных в передней части уменьшается, вследствие чего снижается генерируемая ими тяга. В результате орнитоптер наклоняется заданном направлении. Аналогичным образом происходит управление по оси крена с помощью боковых пар крыльев. Для поворотов по оси рысканья изменяют амплитуду движения пар крыльев, расположенных по диагонали. Набор или снижение высоты происходит при увеличении или снижении частоты взмахов всех четырех крыльев. Инженерам удалось увеличить частоту движений крыльями, что привело к увеличению тяги на 125 процентов по сравнению с предыдущей версией робопчелы, которая могла лишь держаться в воздухе, но не имела достаточной тяги для управления рысканьем. В испытаниях робопчела продемонстрировала хорошую управляемость по оси рысканья и способность разворачиваться на угол 90 градусов за 50 миллисекунд со скоростью около 1800 градусов в секунду, что сравнимо с характеристиками мухи дрозофилы. Также робопчела успешно продемонстрировала способность удерживать положение корпуса по оси рысканья при одновременном перемещении по сложной траектории. По словам разработчиков в будущем в созданную ими платформу можно будет интегрировать сенсоры, которые позволят системе управления робопчелы ориентироваться в пространстве. https://www.youtube.com/watch?v=m9lLO1QpdcE Ранее мы рассказывали об инженерах из США, создающих крупные орнитоптеры, которые внешне похожи на птиц. Для этого они используют чучела настоящих животных. Корпус одного из прототипов покрыт перьями кеклика, а в его передней части находится голова чучела этой птицы, а во втором беспилотнике используются настоящие крылья голубя.